TORCS Dataset Papers With Code
Por um escritor misterioso
Descrição
TORCS (The Open Racing Car Simulator) is a driving simulator. It is capable of simulating the essential elements of vehicular dynamics such as mass, rotational inertia, collision, mechanics of suspensions, links and differentials, friction and aerodynamics. Physics simulation is simplified and is carried out through Euler integration of differential equations at a temporal discretization level of 0.002 seconds. The rendering pipeline is lightweight and based on OpenGL that can be turned off for faster training. TORCS offers a large variety of tracks and cars as free assets. It also provides a number of programmed robot cars with different levels of performance that can be used to benchmark the performance of human players and software driving agents. TORCS was built with the goal of developing Artificial Intelligence for vehicular control and has been used extensively by the machine learning community ever since its inception.
第14回 配信講義 計算科学技術特論A(2021)

B Ravi Kiran - CatalyzeX
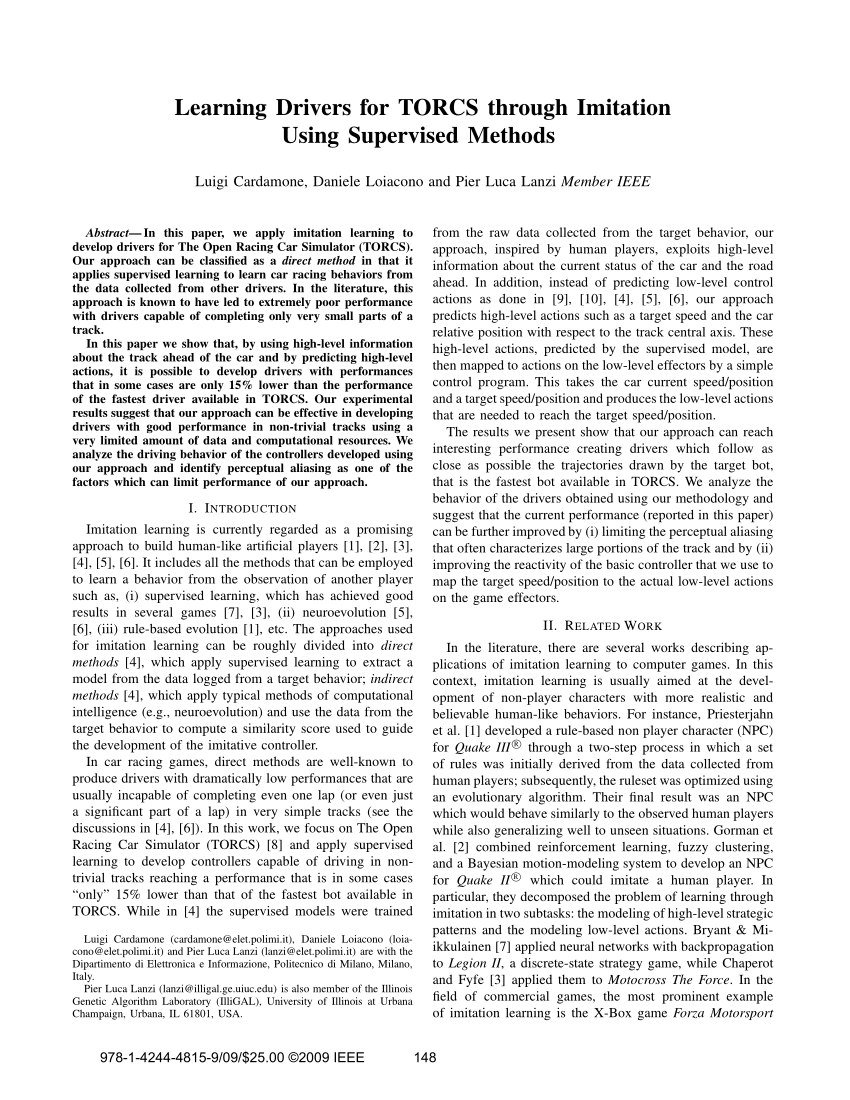
PDF) Learning drivers for TORCS through imitation using supervised methods
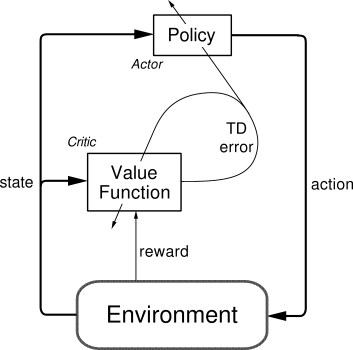
Using Keras and Deep Deterministic Policy Gradient to play TORCS
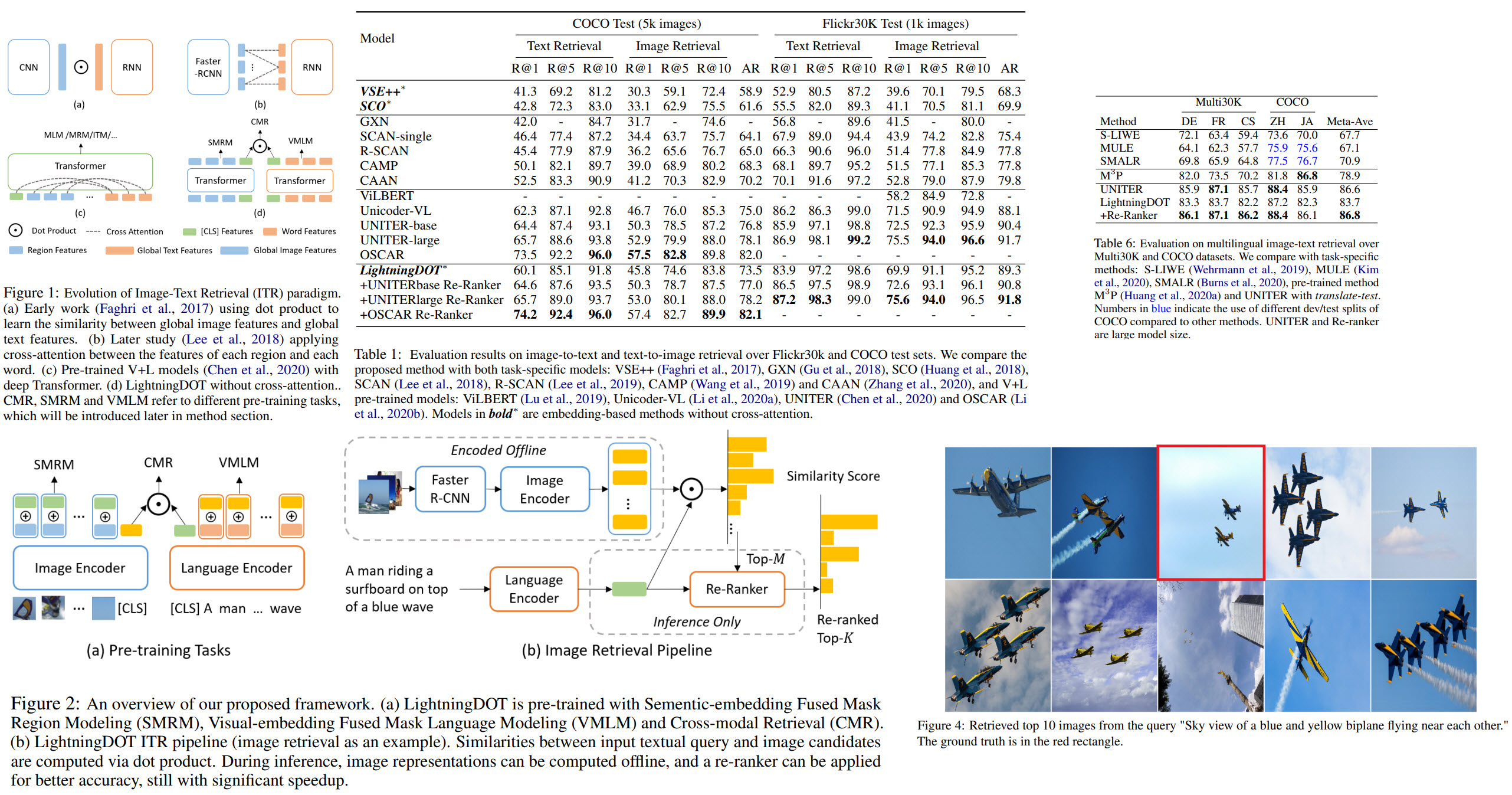
Paper Review: LightningDOT: Pre-training Visual-Semantic Embeddings for Real-Time Image-Text Retrieval – Andrey Lukyanenko

PDF) Deep-Q Learning for Autonomous Driving System in Simulation Environment

Deep_Reinforcement_Learning_for_Autonomous_Driving_A_Survey

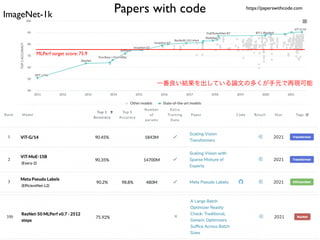
Machine Learning Datasets
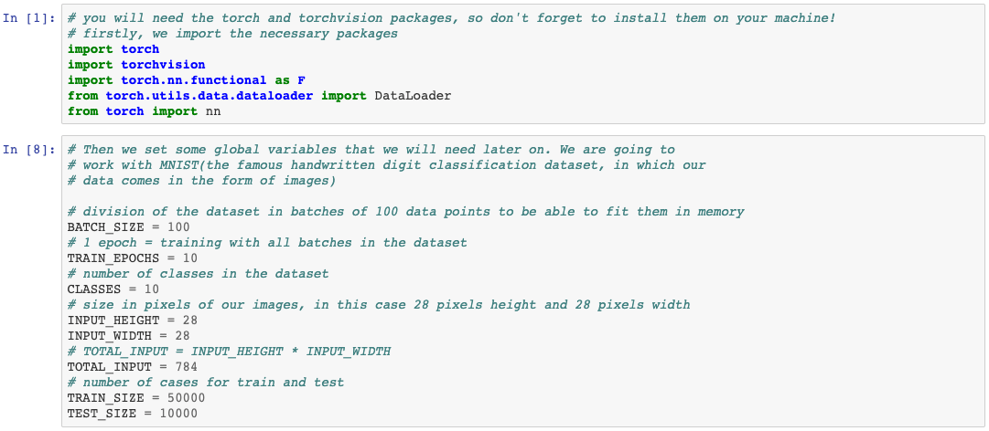
Neural Networks in Python: From Sklearn to PyTorch and Probabilistic Neural Networks

Machine Learning Datasets

Sensor Fusion: Gated Recurrent Fusion to Learn Driving Behavior from Temporal Multimodal Data
deep-autonomous-driving-papers/README.md at master · daviddao/deep-autonomous-driving-papers · GitHub
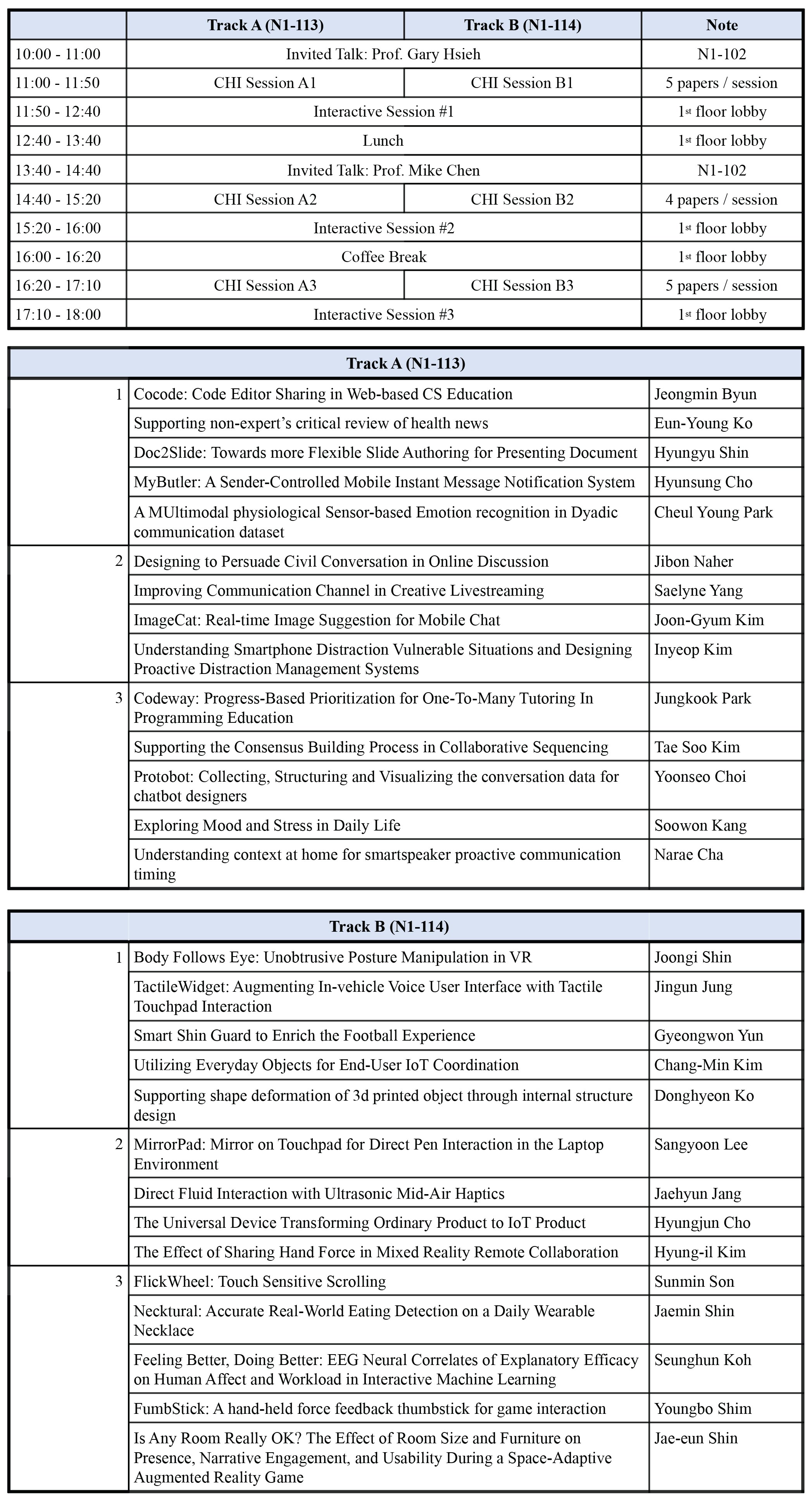
admin_hci – Page 2 – HCI@KAIST
de
por adulto (o preço varia de acordo com o tamanho do grupo)