Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição

Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

Control Strategies for Soft Robot Systems - Wang - 2022 - Advanced Intelligent Systems - Wiley Online Library

Mechanism Design for Robotics
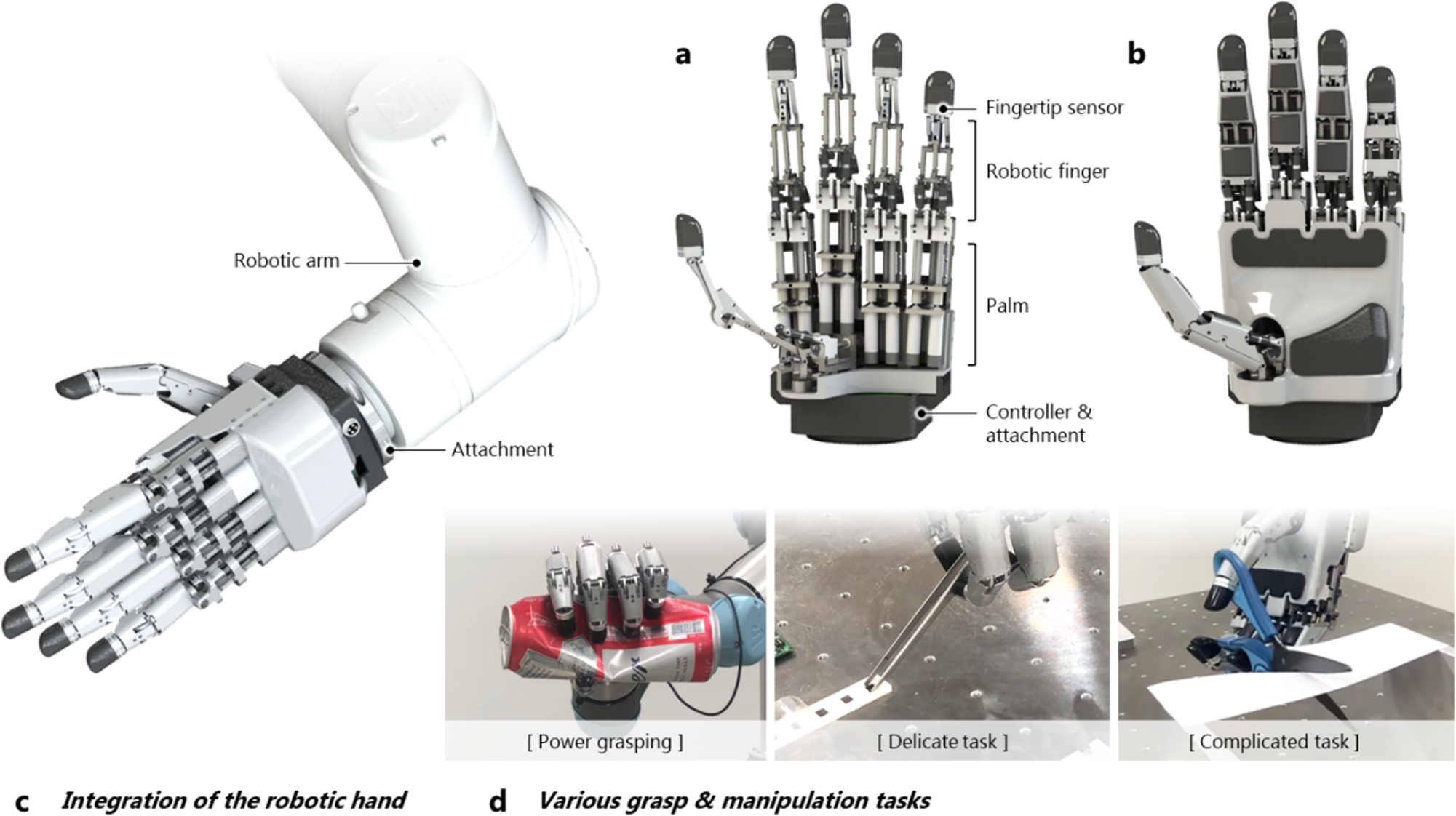
Integrated linkage-driven dexterous anthropomorphic robotic hand

Symmetry-Breaking Actuation Mechanism for Soft Robotics and Active Metamaterials

A Novel Design of Extended Coaxial Spherical Joint Module for a New Modular Type-Multiple DOFs Robotic Platform

Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect

Kinematics analysis of a 3-DOF joint for a novel hyper-redundant robot arm
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

Design and Analysis of a Spatial 3-DOF Parallel Manipulator with 2T1R-Type - Yanbin Zhang, Kwun-Lon Ting, 2013

Figure 5 from Concept of a three D.O.F spherical-joint gripper for industrial robots
de
por adulto (o preço varia de acordo com o tamanho do grupo)

ST.1943-541X.0001763/asset/b45c3c7f-4d65-4ee0-bfba-8011c75e8660/assets/images/large/figure2.jpg)