ROS Basics in 5 days (C++) 4.4 Topics Quiz Not subscribed to
Por um escritor misterioso
Descrição
I don’t understand what I am doing wrong. The robot avoids an obstacle. The node name is correct (“topics_quiz_node”). No other programs are running. #include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <sensor_msgs/LaserScan.h> float angVel = 0; void laserCallback(const sensor_msgs::LaserScan::ConstPtr& laserScan) { angVel = 0.0; ROS_INFO("Forward: %f", laserScan->ranges[360]); ROS_INFO("Left: %f", laserScan->ranges[719]); ROS_INFO("Right: %f", laserScan->ranges[719]);

ROS Q&A] 189 - How to create a custom message for ROS Actions

Understanding the Multifaceted Mechanism of Compound I Formation in Unspecific Peroxygenases through Multiscale Simulations

Fast RTPS Workshop at FIWARE Summit 2018
IJMS, Free Full-Text

Placement Chronicles Semester 1 - AY 2021-22, PDF, Databases

Larry H. Bernstein, Leaders in Pharmaceutical Business Intelligence (LPBI) Group
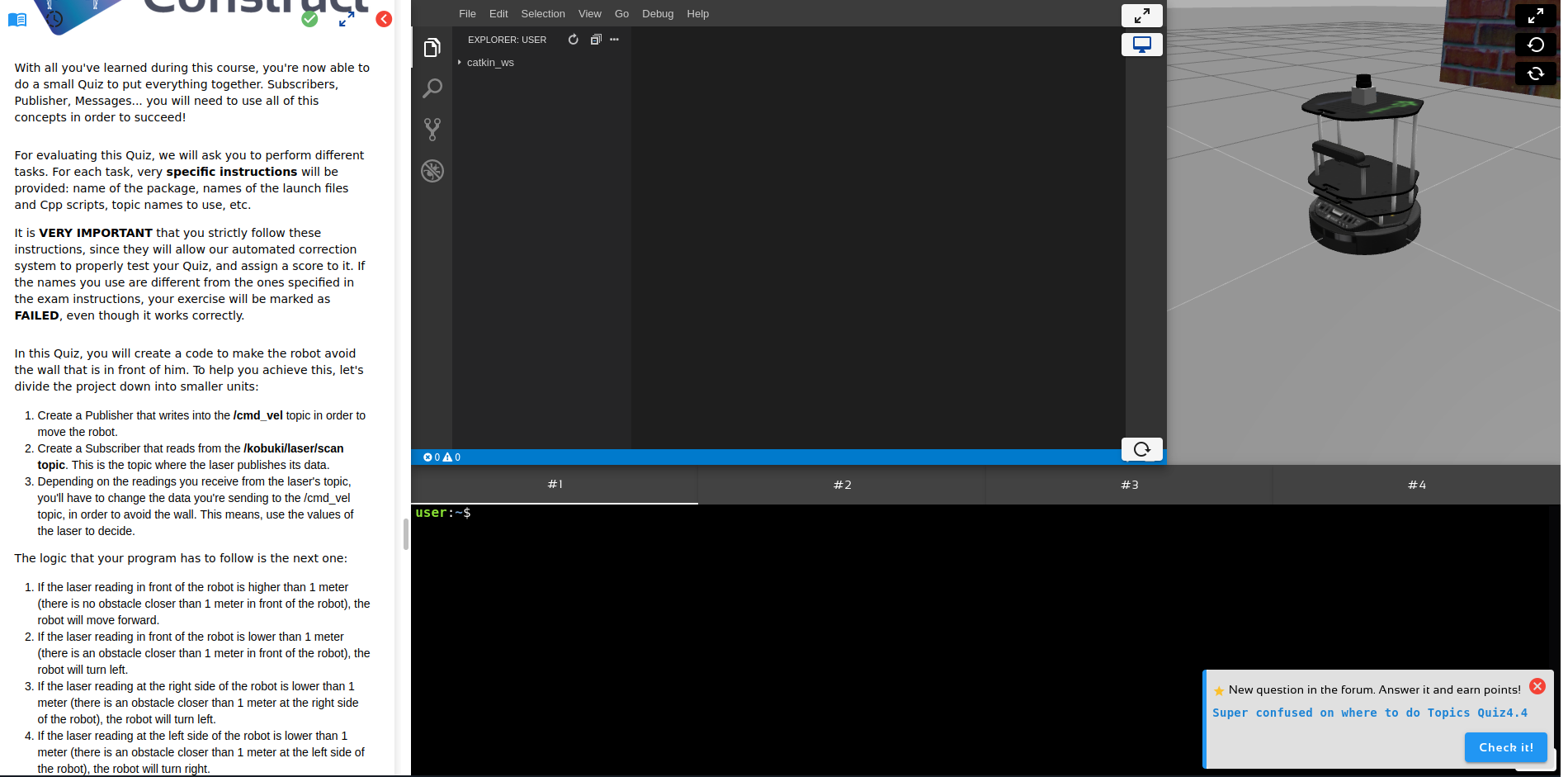
Super confused on where to do Topics Quiz4.4 - ROS Basics In 5 Days (C++) - The Construct ROS Community

OMNeT++ - Simulation Manual
Main Page

A co‐creation experiment for virtual laboratories of mechanics in engineering education - Craifaleanu - 2022 - Computer Applications in Engineering Education - Wiley Online Library

Bartek's coding blog

ROS FOR BEGINNERS: ROS Basics In 5 Days (C++)
de
por adulto (o preço varia de acordo com o tamanho do grupo)